The demo was filmed by the students with a small camera. Sorry for the shaking at times !
Blender-OROCOS robot control
| Submitted by Ruben Smits on Tue, 2008-08-19 09:35 |
The result of a master thesis: connecting Blender with OROCOS to execute milling tasks.
The demo was filmed by the students with a small camera. Sorry for the shaking at times !
The demo was filmed by the students with a small camera. Sorry for the shaking at times !
Constraint-based motion specification application using two robots
| Submitted by Tinne De Laet on Thu, 2008-07-24 16:49 |
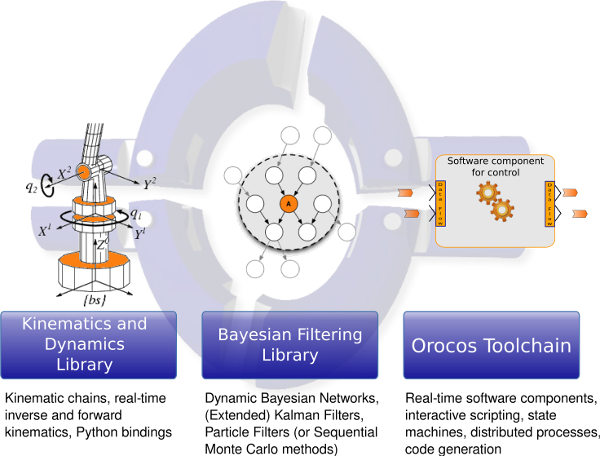
The ACM research group of the K.U.Leuven used Orocos Real-Time Toolkit as framework for an involved robotics application as well as Orocos Bayesian filtering library and Kinematics and Dynamics Library as detailed in this paper.
The experiment consists of a complex task—“human-aware task execution”—involving two robot arms, five PCs interconnected by ethernet, and half a dozen or so sensors.
»
- Login or register to post comments
- See complete post...
[ANNOUNCE] Simulink toolbox for Orocos
| Submitted by sspr on Fri, 2008-07-04 09:15 |
The Flander's Mechatronics Technology Centre (http://www.fmtc.be) has
released a toolbox for creating Orocos components in Matlab/Simulink. It
lets you generate from Real-Time Workshop a ready to use component from a
Simulink model. The toolbox works for Simulink in Linux and Windows and comes
with a Windows installer and a user manual. A component generated with this
toolbox can be immediately compiled and loaded in an Orocos application,
without the need to write extra code.
»
- Login or register to post comments
- See complete post...
Autonomous car uses Orocos middleware
| Submitted by sspr on Mon, 2008-03-31 13:59 |

The Berlin Racing Team of the 2007 Urban Grand Challenge Competition is using the Orocos Real-Time Toolkit as framework for building software components. They are one of the semifinalists selected by DARPA. There is an impressive movie (84MB) of this car in action.
You can read more about the use of Orocos on their website. See also their main page for a full overview of this project.
The core of the team consists of researchers and students of Freie Universität Berlin working together with partners from the Fraunhofer Gesellschaft (IAIS), and Rice University in Houston, Texas.
[ANNOUNCE] Orocos Component Library v1.4.1 Released
| Submitted by sspr on Tue, 2008-03-25 22:45 |
This is the first bug fix release of the Orocos Components Library v1.4
and only contains backwards compatible fixes.
»
- Login or register to post comments
- See complete post...
[ANNOUNCE] Real-Time Toolkit v1.4.1 released
| Submitted by sspr on Tue, 2008-03-25 22:45 |
The Orocos development team is pleased to announce the first bug-fix
release of the Real-Time Toolkit v1.4, a C++ toolkit for building
component based, real-time robotics and machine control applications.
»
- Login or register to post comments
- See complete post...
[ANNOUNCE] Real-Time Toolkit and Orocos Component Library 1.4.0 released
| Submitted by sspr on Tue, 2007-11-27 16:05 |
With quite some delay, but in good shape, the new RTT and OCL releases
have arrived. We decided to set the 'major' version numbers (1.4) of the RTT
and OCL equal, such that it is easier for users to match them.
Most importantly, Debian 'etch' packages are available thanks to a very
helpful user. We provide the RTT for standard Linux (-gnulinux) RTAI/LXRT
(-lxrt) and Xenomai (-xenomai). The OCL is currently only available for
standard Linux and LXRT. Also, not all OCL components are available yet,
particularly those depending on KDL. You can find them here:
deb http://svn.fmtc.be/debian etch main
[ANNOUNCE] Orocos Real-Time Toolkit v1.2.2 released
| Submitted by sspr on Fri, 2007-10-19 15:55 |
This release has been on the shelf for a while. Most work went into preparing
RTT 1.4.0 which will go out by the end of this month. So here go the official
release notes:
The Orocos development team is pleased to announce the second bug-fix
release of the Real-Time Toolkit v1.2, a C++ toolkit for building
component based, real-time robotics and machine control applications.
KDL-1.0.0-beta1 Release!!!
| Submitted by Ruben Smits on Mon, 2007-08-20 13:19 |
The first major-version KDL-Release is being prepared. KDL-1.0 will contain algorithms for rigid-body positions/velocity/force calculations and transformations. This part of KDL is not changed with respect to the previous versions.
There is a major rewrite and API change in the kinematic family section:
* The representation of a chain is changed.
* The usage of all the kinematic solvers is changed.
»
- Login or register to post comments
- See complete post...
Bayesian Filtering Library 0.6.1 released
| Submitted by Tinne De Laet on Tue, 2007-08-07 15:14 |
The Bayesian Filtering Library development team is pleased to announce the first bug-fix release of the Bayesian Filtering Library v0.6.
You can download this release from
»
- Login or register to post comments
- See complete post...